

Obecny rozwój techniki umożliwia konstruowanie bardzo zaawansowanych urządzeń. Aby urządzenia te mogły znaleźć zastosowanie w różnych obszarach naszego życia (jako np. roboty usługowe, inspekcyjne), muszą zostać odpowiednio zaprojektowane
|
|
|
FOT. 1. Przygotowanie robotów do walki |

Dzięki szybkiemu rozwojowi technicznemu powstają nowe obszary nauki, takie jak mechatronika. Właśnie dzięki mechatronicznemu podejściu do projektowania można uzyskać urządzenia, które są efektem synergii takich podstawowych obszarów nauki, jak inżynieria mechaniczna, inżynieria elektryczna, inżynieria oprogramowania.
Przykładami mechatronicznego podejścia do konstruowania są między innymi roboty wykonane w ramach prac magisterskich Katedry Robotyki i Dynamiki Maszyn Akademii Górniczo-Hutniczej w Krakowie. Roboty te zostały zaprojektowane do walk sumo. Reguły współzawodnictwa są następujące: walka odbywa się pomiędzy dwoma robotami (fot. 1), których waga nie może przekroczyć 3 kg. Zadaniem robota jest zlokalizowanie przeciwnika na ringu o średnicy 153 cm, a następnie wypchnięcie poza ring. Każdy robot musi mieć odpowiednie układy sensoryczne umożliwiające badanie stanu jego otoczenia (np. czujniki przekazujące informacje o położeniu robota, aby nie wyjechał poza ring). Podczas I Ogólnopolskich Zawodów Sumo Robotów w Poznaniu w 2004 roku nasza ekipa zajęła I miejsce po pasjonującej walce finałowej.
|
|
|
FOT. 2. Roboty WIMIREK i IMIREK |
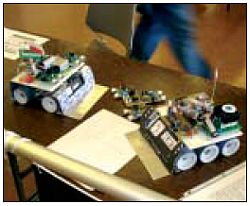
W 2005 r. dzięki pomocy JM rektora AGH oraz dziekana Wydziału Inżynierii Mechanicznej i Robotyki przygotowano wyjazd na zawody do Kanady, zorganizowane 14 maja przez Western Canadian Robotics Society. Była to 15. edycja tych zawodów.
Patronem i jednym ze sponsorów zawodów był SAIT (Sauthern Alberta Institute of Technology), na terenie którego odbyło się spotkanie w kilku kategoriach: minisumo, international sumo, line follower (podążanie po wyznaczonej trasie) oraz mine sweeper (wyszukiwanie metalowych obiektów zakopanych w piasku i omijanie przeszkód). Nasze roboty mobilne WIMIREK i IMIREK startowały w kategorii international sumo. Po zakwalifikowaniu się wzięły udział w rozgrywkach na zasadzie każdy z każdym, zajmując V i VII miejsce. Dodatkowo roboty te (fot. 2) wzięły udział w konkursie na najlepszą elektronikę i zajęły I miejsce.
Opisane roboty uczestniczyły także w tym roku w wydarzeniu artystycznym podczas prezentacji prac Jani Konstantinovski w Muzeum Zamkowym w Malborku.
|
|
|
FOT. 3. Robot mobilny w jednej z komnat zamkowych |
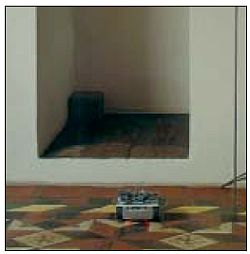
W projekcie tym wzięły udział 4 roboty mobilne wykonane w Katedrze Robotyki i Dynamiki Maszyn AGH, które zostały przez artystę wkomponowane w scenerię zamku krzyżackiego. Z technicznego punktu widzenia zadanie trudno było zrealizować, ponieważ należało odpowiednio zsynchronizować poruszanie się robotów podczas prezentacji multimedialnej. Na zdjęciach (fot. 3 i 4) pochodzących z albumu “Seven Gates to Eternity” przedstawiono połączenie nowoczesnych form związanych z techniką (mobilne roboty) ze starymi komnatami zamkowymi. W projekcie wykorzystano: 2 mobilne roboty 4-kołowe, mobilny robot 6-kołowy oraz mobilny robot kroczący sześcionożny. Każdy robot był jednostką w pełni autonomiczną, czyli człowiek nie miał bezpośredniego wpływu na jego zachowanie. Wszystkie roboty zostały wyposażone w sensory, które zbierały informacje o bezpośrednio otaczającej je przestrzeni. Podstawowymi układami sensorycznymi robotów były czujniki ultradźwiękowe, fotooptyczne oraz czujniki podczerwieni.
|
|
|
FOT. 4. Robot kroczący w szklanym akwarium |

Dzięki zastosowaniu tego typu układów roboty mogły brać udział w prezentacjach zarówno w dzień, jak i w nocy.
Szczególnie imponujące wrażenie robił robot kroczący umieszczony w szklanym akwarium (fot. 4). Robot ten, poruszając nie ruchem falowym pedipulatorów, starał się wydostać ze szklanej bryły. Podczas prezentacji multimedialnej na zamku wykorzystano również przygotowane wcześniej filmy z zarejestrowanym sposobem poruszania się robotów, tworząc wielkich rozmiarów projekcje na murach zamkowych.
Obecnie wspomniane w artykule roboty są przygotowywane do kolejnych zawodów oraz prezentacji w Polsce.
Autor: Tomasz Buratowski, Tadeusz Uhl, Katedra Robotyki i Dynamiki Maszyn AGH


