

Organizowany przez Defense Advanced Research Projects Agency (DARPA) pod hasłem ?zwycięzca bierze wszystko? wyścig przez pustynię, z nagrodą 2 mln dolarów, przyciągnął zespoły najlepszych inżynierów z kilku krajów
|
|
|
OCZY, MÓZGI ORAZ MIĘŚNIE. Oczami rozwiązania Virginia Tech są laserowe systemy pomiarowe, kamery stereo oraz czujniki radarowe. Różnorodne serwery działają jako mózgi, podczas gdy silniki elektroniczne stanowią napęd mięśni |

8 października przed nastaniem świtu inżynierowie ustawiali już na linii startu swoje pojazdy terenowe, SUV, hummery i pick-upy, szykując je do ? zdawałoby się ? niewykonalnej misji. Cel: pustynia. A po skontrolowaniu i ostatnim sprawdzeniu wszystkich czujników, serwerów, laserów i LIDAR-ów (te ostatnie służą do wykrywanie i klasyfikowanie przy użyciu światła), przewodowego sterowania układem kierowania oraz przewodowego hamowania, chorągiewka została opuszczona, inżynierowie pozwolili swoim ?dzieciom? wyruszyć i obserwowali, jak podążają do najbliższej piaszczystej wydmy i znikają z zasięgu wzroku. Jak bezradni rodzice, niezdolni do zrobienia czegokolwiek, oczekiwali na wiadomości, że ich pojazdy rozbiły się, zgasły na szczycie skały, zaczęły kręcić zawrotne kółka niczym pies goniący za własnym ogonem lub w końcu przekroczyły linię mety znajdującą się w odległości 280 km, zarabiając… 2 mln dolarów ? nagrodę dla zwycięzcy, który zgodnie z hasłem ?bierze wszystko?.
Nigdy od czasu osławionych wyścigów transkontynentalnych sprzed wieku tak wiele zespołów fabrycznych ani tylu inżynierów, profesorów, studentów i ?garażowych eksperymentatorów? nie zaangażowano do takiego zadania.
ZESPÓŁ PROFESORA Charlesa Reinholtza z Virginia Tech wystawił do wyścigu dwa pojazdy: Rocky ? wykorzystuje bazującą na mapie technikę wykrywania przeszkód, a Cliff ? stosuje metodę behawioralną
Z pozoru faktycznie niewykonalne. Od chwili, gdy wyścig się rozpoczął, zespoły konstruktorów nie mogły już nic zrobić. Nie ma zdalnego sterowania, nie ma kierowcy. Wykorzystując kamery stereo, radar oraz lasery, pojazdy same musiały wyszukiwać przeszkody, następnie toczyć się do przodu z prędkością do 100 km/godz., w poprzek piaszczystych wydm, przez doliny, wzdłuż autostrad i przez rzeki, stosując się do wytyczających trasę punktów, wskazywanych im przez satelitarny system namierzania.
Tak jak każdy kierowca musiały podejmować decyzje. Określać, czy przedmiot przed nimi jest kamiennym murem czy chmurą pyłu, latającym owadem czy linią drutu kolczastego. Rozpoznać zagrody dla bydła oraz tzw. zapory przeciwczołgowe (długie stalowe kątowniki ułożone na pustynnych szczytach w celu powstrzymania czołgów) i je omijać.
Dla zyskania pewności zespoły wykonały wcześniej podobne próby i powiodło im się nie najlepiej. Żaden z pojazdów uczestniczących w pierwszym Grand Challenge w 2004 r. nie przejechał więcej niż 12 km. Jeden zawisł na małej skale pokonawszy 10 km. Drugi nieoczekiwanie zahamował po przejechaniu zaledwie 46 metrów. Trzeci, 10-tonowa ciężarówka, powlókł się do przodu kilkadziesiąt centymetrów i stanął jak wryty, przytłoczony ilością sygnałów z czujników bombardujących jego mały móżdżek. Występy pozostałych uczestników zakończyły się podobnie, w mało efektownym stylu.
Jednakże teoroczni uczestnicy byli przekonani, że ten rajd będzie inny. ? Zobaczycie znacznie lepsze wyniki, częściowo dlatego, że zespoły miały czas na dopracowanie oprogramowania ? zauważył Brad Chen, starszy architekt z Performance Tools Laboratory w Intel Corp., które wspiera zespoły uniwersytetów Stanford oraz Carnegie Mellon.
? Żywimy przekonanie, że tym razem kilka zespołów może ukończyć wyścig ? mówił przed wyścigiem Bruce Hall, prezes Digital Auto Drive, firmy, która również przygotowała pojazd. ? Tego roku będzie to zupełnie inny wyścig.
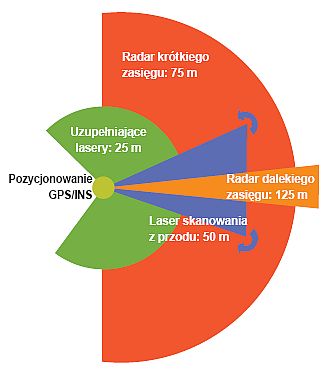
INŻYNIEROWIE Carnegie Mellon zalecają stosowanie wielu czujników przeszukujących różne odległości z przodu ich pojazdów
Pilny i ważny
Faktycznie, był inny, choćby dlatego, że zespoły inżynierów zrozumiały wreszcie, jakie to trudne zadanie.
Sam pomysł jest łatwy do określenia: zbudować pojazd, który pomyślnie przemierzy 280-kilometrową drogę. Jednakże DARPA, ramię amerykańskiego departamentu obrony, rozmyślnie dodała przeszkody ? fizyczne oraz innego rodzaju. Szlaki, które muszą przemierzyć pojazdy, przebiegały w większości w terenie pokrytym przeszkodami, a mimo to musiały być pokonane w ciągu 10 godzin, co narzuca przeciętną prędkość 28 km/godz. Co więcej, DARPA była nieugięta w kwestii informacji o szlaku, chcąc widocznie zapobiec sprytnemu zaprogramowaniu trasy wzdłuż wytyczających ją punktów przez niektóre zespoły. W kwestii tej agencja zapowiedziała jedynie, że przejazd będzie ?cechowała konieczność pokonania terenu pustynnego?, gdzieś w południowozachodniej części Stanów Zjednoczonych, prawdopodobnie pustyni Mojave.
Poza tym istnieje oczywiście poczucie ważności wykonywanego zadania. Departament obrony potrzebuje technik, które wspomogą stworzenie autonomicznych pojazdów pola walki. ? Jeżeli zapytacie DARPA, dlaczego pragnęła przeprowadzić ten wyścig, usłyszycie, że zamierzała dostarczać ciężarówki do transportu posiłków, wody oraz innego zaopatrzenia pomiędzy Falludżą a Bagdadem bez narażania żołnierzy ? mówi Hall z Digital Auto Drive.
Ponadto oczekuje się, że również branża motoryzacyjna będzie bacznie obserwować wyniki. W laboratoriach badawczych wielkich producentów aut zakłada się, że inżynierowie już pracujący nad autonomicznym utrzymywaniem drogi oraz nad systemami unikania kolizji skorzystają z wysiłków i doświadczeń uczestników Grand Challenge.
Nie jest jednak zaskoczeniem, że sami uczestnicy mówią, iż są to bardziej ćwiczenia z zakresu robotyki niż inżynieria motoryzacyjna. ? Każdy widzi bezzałogowe pojazdy toczące się przez pustynię ? zauważa profesor William ?Red? Whittaker, profesor robotyki uniwersytetu Carnegie Mellon, a zarazem lider dwóch uczelnianych zespołów. ? W rzeczywistości one się nie toczą, lecz raczej… nieustannie obliczają swoją drogę, którą muszą pokonać.
|
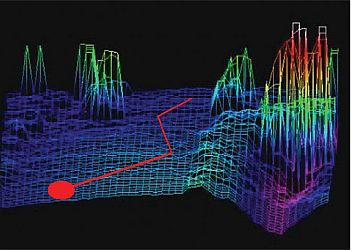
Wybierz strategię Dzięki detekcji przedstawianej w formie mapy, wygląd terenu umieszczony zostaje na siatce, a większe wartości reprezentują większe przeszkody Planowanie trasy na podstawie mapy
Behawioralne planowanie trasy
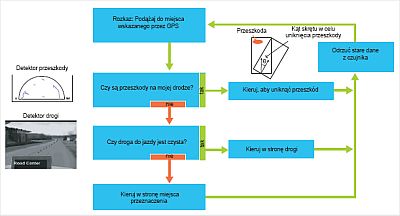
W DETEKCJI BEHAWIORALNEJ komputery do wytyczenia trasy pojazdu wykorzystują logikę (Rysunek zawdzięczany uprzejmości Virginia Tech University) |
Wytyczanie trasy
Dla większości obliczanie jest nadzwyczajnym wyzwaniem, ponieważ musi służyć jako podstawa dwóch funkcji: podążania według wytyczających trasę punktów GPS oraz unikania przeszkód na trasie.
Samo podążanie wytyczonym szlakiem może być trudne, mówią uczestnicy, a może stać się jeszcze trudniejsze, gdy delikatne urządzenie GPS przestanie wysyłać naziemne dane. Wówczas do określenia swojej pozycji, pojazdy muszą wykorzystywać inercyjne systemy nawigacji (INS), składające się z połączenia żyroskopów i mierników przyśpieszenia. INS działa wykorzystując akcelerometry zapewniające informacje o przyśpieszeniu (w trzech osiach) oraz żyroskopy dostarczające informacje o prędkościach kątowych.
? Dzięki integracji wartości dwóch przyśpieszeń oraz jednej prędkości kątowej można całkiem łatwo określić zmiany swojej pozycji i orientacji ? mówi Charles Reinholtz, wyróżniony absolwent, profesor inżynierii mechanicznej uniwersytetu Virginia Tech, posiadającego w finałowej czterdziestce Grand Challenge dwa pojazdy.
POJAZD zespółu DAD wykorzystuje do 15 procesorów DSP, umożliwiających przeprowadzanie 36 miliardów operacji na pikselach na sekundę
|
Czym jest Grand Challenge? Organizowany przez Defense Advanced Research Projects Agency (agencja badawcza zaawansowanych projektów obronnych) pod hasłem ?zwycięzca bierze wszystko?, z nagrodą 2 mln dolarów, Grand Challenge stawia przed zespołami konstrukcyjnymi zadanie pozornie niemożliwe: zaprojektowanie pojazdu bezzałogowego, zdolnego do przejechania 280 km pustynnej trasy w czasie krótszym niż 10 godzin. DARPA, badawczo-rozwojowe ramię departamentu obrony USA, ogłosiło konkurs Grand Challenge w odpowiedzi na mandat kongresu, w nadziei ochrony życia na polu walki dzięki wykorzystaniu pojazdów bezzałogowych. Zawody w 2005 r. były już drugimi. Podczas pierwszych (w 2004 r.) żaden z pojazdów nie pokonał wyznaczonej trasy, a najlepszy z nich przejechał zaledwie 12 km. Tegoroczne zawody przyciągnęły w początkowej fazie uczestników ze 195 zespołów konstruktorskich z korporacji, uniwersytetów, a nawet szkół średnich. 6 czerwca po wizytach członków zespołu technicznego przeprowadzonych w siedzibach uczestników DARPA ogłosiła listę 40 półfinalistów. Ta czterdziestka od 27 września do 6 października konkurowała w National Qualification Event na torze wyścigowym w Kalifornii. Kwalifikacje ograniczyły liczbę uczestników do 20 finalistów, którzy 8 października ścigali się w odbywającym się na pustyni Mojave Grand Challenge. Wśród 40 zespołów faworytami były dwa zespoły Carnegie Mellon: Red Team oraz Red Team Too, prowadzone przez legendarnego inżyniera robotyki Reda Whittakera. Większość półfinalistów była przekonana, że tegoroczny Challenge będzie prawdziwym wyścigiem, jednak prawdopodobnie tylko 6 zespołów będzie rywalizowało na całym dystansie, dochodząc do linii mety. Inni najwięksi faworyci to Team DAD (sponsorowany przez Digital Auto Drive), Stanford Racing Team, SciAutonics/Auburn Engineering oraz dwa zespoły Virginia Tech ze swoimi pojazdami znanymi jako Cliff i Rocky. ? Kilka zespołów, poczynając od Red Team, ma dużą szansę ukończenia w tym roku wyścigu ? mówił Bruce Hall, prezes Digital Auto Drive i członek zespołu DAD, konstruktor pojazdu, który przejechał 10 km podczas pierwszego Grand Challenge. |
Wielu uczestników mówi, że samo podążanie według wytyczonych punktów jest prawdziwie dziecinną zabawą w porównaniu ze złożonością wykrywania przeszkód.
? Wiele zespołów nie jest w stanie przejść przez pierwszy kwadrat, będący punktem wytyczającym trasę ? zauważa Hall. ? Lecz prawdziwym wyzwaniem jest uzyskanie wystarczającej liczby danych, które pozwolą utworzyć dokładną mapę terenu oraz podejmować prawidłowe decyzje co do przeszkód.
|
|
|
AUTONOMICZNY pojazd Sandstorm z Carnegie Mellon (z radarowym systemem na szczycie błękitnego dachu) w lipcu br. w ciągu siedmiu godzin przejechał przeszło… 320 km na 2-km brukowanym odcinku trasy wyścigu |

Dla większości z 40 rywali, pozostających we współzawodnictwie od początku września, unikanie przeszkód polega na zastosowaniu jednej z dwóch strategii: obliczeń opartych na mapie lub obliczeń behawioralnych wykorzystujących zachowanie).
W metodzie bazującej na mapie pojazd wykorzystuje różne czujniki ? kamery stereo, czujniki radarowe, czujniki laserowe i/lub urządzenia LIDAR ? w celu uzyskania różnego rodzaju danych potrzebnych do stworzenia tak zwanej mapy terenu. Komputery pojazdu stosują zaimplementowane przez konstruktorów oprogramowanie do sprawdzenia nadchodzących danych oraz identyfikacji potencjalnych przeszkód.
Na przykład pojazd Rocky z uniwersytetu Virginia Tech tworzy programową siatkę przypominającą kafelki podłogowe, z oczkami siatki odpowiadającymi w przybliżeniu kwadratowi o boku 30 cm. Następnie komputer pokładowy sprawdza dane przychodzące z laserowego systemu pomiarowego Sick Optic i zapełnia te programowe powierzchnie liczbami z zakresu od 0 do 10, gdzie dziesiątki oznaczają najgorszego rodzaju przeszkody, nie do pokonania. ? Jeżeli na przykład widzimy skałę, przydzielamy do siatki najwyższą liczbę, która mogłaby ostrzec pojazd, aby tamtędy nie jechał ? mówi Reinholtz.
Następnie system stosuje kod programowy, taki jak np. algorytm Djikstra oraz algorytm A*, do nakreślenia ścieżki prowadzenia pomiędzy przeszkodami.

? Ogólnie mówiąc, uruchamiasz pojazd na jednym końcu szachownicy, a celem jest osiągnięcie jej drugiego końca ? mówi Reinholtz.
Jednakże negatywną stroną takiej zależności w metodzie opartej na mapie jest to, że pojazd może zakończyć swe działanie, próbując uniknąć przedmiotów, które są tak małe, jak gdyby… nie istniały. ? Jeżeli przed laserowym skanerem przelatuje kropla deszczu, płatek śniegu lub owad, system mógłby pomyśleć, że jest tu jakaś przeszkoda i umieścić ją na mapie ? mówi Reinholtz. ? A następnie próbowałby ją objechać.
|
Wiele pojazdów nie jest w stanie pokonać pierwszego kwadratu, będącego w zasadzie punktem wytyczającym trasę |
Aby się zabezpieczyć, inżynierowie z Virginia Tech zbudowali drugi pojazd, znany jako Cliff, który wykorzystuje metodę behawioralną. Reinholtz mówi, że ta metoda, wykorzystująca do określenia, co pojazd powinien zrobić, podstawowe zadania logiczne, jest pod względem obliczeniowym mniej wymagająca i pozwala na szybsze podejmowanie decyzji. Logiczne podstawy tworzone są przez proste zapytania, takie jak ?Czy na mojej drodze jest przeszkoda?? lub ?Czy istnieje droga, którą można pojechać??.
? Metoda behawioralna nie wymaga długoterminowej pamięci ? objaśnia Reinholtz. ? Jest to wyszukiwanie i stwierdzanie: ?Jeżeli jest droga, chcemy na niej stanąć.?
Intensywne obliczenia
Żadna z tych metod nawigacji nie może jednak zostać zastosowana bez pojazdu, który w zasadzie jest superkomputerem na kółkach. Na przykład pojazdy Carnegie Mellon (Sandstorm i Highlander) dźwigają serwery Intel NetStructure, które mieszczą tzw. kasety, każdą z mikroprocesorami Pentium M. Przetwarzają one dane z czujników, planują oraz przeprowadzają zadania, takie jak wysyłanie sygnałów do sterowanych przewodowo urządzeń, które napędzają, kierują i hamują pojazd. Aby wspomóc serwer NetStructure, pojazdy Carnegie Mellon wykorzystują również mniejszy, montowany na stojaku serwer, włączający równoległą architekturę obliczeniową, zawierający dwa mikroprocesory Intel Itanium. Podwójne Itanium, oferując wydajniejsze operacje zmiennoprzecinkowe niż Pentium M, podejmują bardziej złożone obliczeniowo zadania przekształcania danych z czujników w informacje służące nawigacji.
Inne zespoły również wykorzystują znaczną ilość mocy obliczeniowej. Virginia Tech, Rochester Institute of Technology, University of California-Berkeley, Team Ensco oraz Team Axion wykorzystują rozmaite kombinacje komputerów, kart sterowania ruchem, kart przechwytywania danych, systemów wizyjnych oraz oprogramowanie LabView z National Instruments. Natomiast zespół DAD (kierowany przez Halla z Digital Auto Drive), wykorzystuje nawet do 15 procesorów sygnałów cyfrowych (DSP) z Texas Instruments (TI).
Team DAD, który zastosował własną koncepcję wykorzystującą obracający się bęben o kilku laserach, umieszczony na zczycie pojazdu, używa kombinacji procesorów DSP TI C2406 oraz TI C6000, ponieważ jego inżynierowie są przekonani, że do stworzenia rzetelnej mapy terenu potrzebne są ogromne ilości danych.
? Przetwarzamy niewiarygodne ilości danych ? mówi Hall. ? Obliczyliśmy, że w niektórych momentach przeprowadzamy 36 miliardów operacji na pikselach na sekundę.
Inżynierowie elektronicy twierdzą, że tak niezwykle długie obliczenia będą znacznie bardziej potrzebne, gdy pojazd będzie poruszał się szybciej i dlatego spoglądają dalej, poza horyzont. Na przykład Carnegie Mellon ostatecznie pragnie widzieć na odległość 50 metrów przed pojazdem, lecz nie może jeszcze tego osiągnąć, gdyż… takie pomiary wymagałyby większych mocy obliczeniowych.
? Dysponując typowymi możliwościami obliczeniowymi, można dzisiaj spoglądać ? być może ? na 20 metrów przed pojazdem ? mówi Chen z Intela. ? Jeżeli patrzysz dalej, zbierasz więcej danych i komputer zostaje nimi zasypany.
|
Ogólnie mówiąc, uruchamiasz pojazd na jednym końcu szachownicy, a celem jest osiągnięcie jej drugiego końca |
Jednakże nawet rozważając sposoby gromadzenia większej liczby danych z czujników, inżynierowie muszą umożliwić przewodowy napęd komponentom, które poruszają pojazd i nim kierują. Praktycznie każdy pojazd musi wykorzystywać pewną formę przewodowego napędu, począwszy od prostych systemów wewnątrz kabiny, które pobudzają pedał hamulca i obracająkierownicę, aż do bardziej złożonych urządzeń, które pracują pod maską. Jak mówią inżynierowie, bez względu na wybrany sposób systemy przewodowe muszą być połączone sygnałem cyfrowym z serwerami, które rozsyłają komendy do mechanizmów wykonawczych.

POJAZDY Virginia Tech wykorzystują do wykrywania przeszkód zamontowane w obrotowej klatce widzące stereoskopowo kamery i laserowe lokalizatory zasięgu
Na przykład zespół DAD używa procesora DSP TI C2406 do sterowania 20-konnym bezszczotkowym silnikiem prądu stałego, wykonanym z użyciem magnesów z metali ziem rzadkich. Podobnie silnik przepustnicy i pedału hamulca, znajdujący się w tunelu pomiędzy siedzeniami toyoty Tundra 4 × 4, wykorzystuje dwa dalsze procesory DSP TI.
Kolejny dedykowany sterownik TI pojazd ten wykorzytuje w ?urządzeniu odtwarzającym wytyczoną trasę?, które przejmuje dane satelitarne z odbiornika GPS John Deere NavCom Technology, Inc. i przekształca je w dane nawigacyjne.
Możliwości rynkowe
Pomimo niepowodzeń pierwszego Grand Challenge większość uczestników wierzy, że wyścig roku 2005 wykaże, iż techniki autonomicznych pojazdów dojrzewają i większość z nich mogłaby wkrótce wejść na rynek.
? Jeżeli zaczniesz od rynku militarnego, natrafisz na dużo mniej ograniczeń ? mówi Hall. ? Tam nie masz problemów prawnych lub kosztowych, a ludzie nie dbają o wygląd takiej techniki.
|
Nauczki wyniesione z pierwszego Grand Challenge Pierwszy Grand Challenge DARPA z roku 2004 dał srogą lekcję inżynierom próbującym wysłać autonomiczne pojazdy przez pustynię. Profesor William ?Red? Whittaker, profesor robotyki w Fredkin Research na uniwersytecie Carnegie Mellon, tak przedstawia swoje trzy najważniejsze lekcje:
|
Należy się spodziewać, że zdobycie rynku motoryzacyjnego może potrwać dłużej. Koszty i kwestie prawne, jak również obawy przed potencjalnymi nakazami technicznymi ze strony organizacji takich jak NHTSA (National Highway Traffic Safety Administration ? państwowa administracja bezpieczeństwa ruchu na autostradach) mogłyby spowolnić postęp w dziedzinie komponentów pojazdów autonomicznych.
A jednak wielu inżynierów wierzy, że techniki wykrywania przeszkód z wyścigu Grand Challenge mogłyby znaleźć zastosowanie w autonomicznych systemach unikania kolizji, które są aktualnie rozwijane przez czołowych dostawców.
? Jeżeli patrzy się na to z perspektywy wzrostu bezpieczeństwa, to należy uznać, że w październiku ukazały się pewne zadziwiające techniki ? mówi Chen z Intela.
Co więcej, niektórzy inżynierowie są przekonani, że Grand Challenge udowodnił, iż autonomiczne pojazdy osiągnęły szczyty możliwości technicznych i nie ma problemu z ich publiczną akceptacją. ? Nie istnieje żadna techniczna przeszkoda, która by to uniemożliwiła ? mówi Hall z Digital Auto Drive. ? Jesteśmy o lata, a nie o dekady od dopuszczenia systemów użytkowych.
Autor: TEKST: CHARLES J. MURRAY, ZDJĘCIA: DAVID SHARPE


